









Možnosti prepojenia nervového a elektronického systému
Ľudia, ktorí v dôsledku úrazov alebo chorôb prišli o končatiny, sú odkazaní prežiť zvyšok života ako invalidi. Tie najjednoduchšie každodenné činnosti, napríklad obliekanie či hygiena, pre nich predstavujú problém. Medicína im ponúka len veľmi nedokonalé protézy, ktoré nahradia iba zlomok funkcií pôvodných orgánov. Pritom dnes možno vyrobiť umelé robotické ramená, ktoré sa mechanickými vlastnosťami, silou či presnosťou vyrovnajú ľudským končatinám, často ich dokonca predčia. Podobné elektronicky ovládané zariadenia by mohli slúžiť ako protézy a výrazne uľahčiť život ľuďom s telesným hendikepom. Akokoľvek dokonalé mechanické protézy však môžu úplne nahradiť chýbajúce končatiny iba vtedy, keď pacienti budú mať možnosť ovládať ich svojou vôľou rovnako prirodzene, ako zdraví ľudia pohybujú rukami a nohami. Na prvý pohľad to vyzerá ako sen, mnohí vedci sú však presvedčení, že k jeho uskutočneniu nie je ďaleko. Skúmajú, ako „čítať“ nervové impulzy, ktorými mozog riadi svaly končatín, a ako im porozumieť, aby mohli tieto mozgové signály využiť na ovládanie robotických zariadení.
Ako riadiť umelé končatiny povelmi z mozgu
Pohyby končatín riadi časť mozgovej kôry zvaná motorická i niektoré ďalšie časti mozgu, napríklad bazálne gangliá a ventrolaterálny talamus. Dnes možno implantovať do týchto oblastí elektródy, a tak snímať aktivitu nervových buniek voľne sa pohybujúcich zvierat. Keby sa podarilo nájsť vzťah medzi aktivitou týchto neurónov a pohybmi končatín, bolo by možné na základe nervových impulzov zaznamenaných z mozgu ovládať protézy. Podobnú úlohu riešil profesor Chapin so spolupracovníkmi z Newyorskej štátnej univerzity v Brooklyne. Pokúsili sa ovládať pohyby robotického ramena pomocou nervovej aktivity snímanej z motorickej kôry potkanov.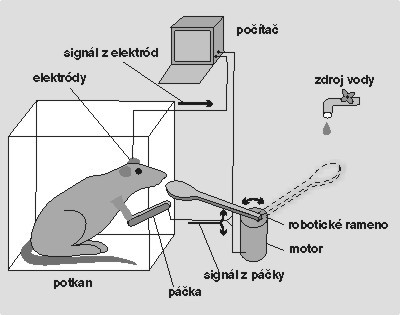{kind=link}
 Ich pokus si predstavíme bližšie. Smädné potkany boli natrénované, aby prednými labkami stlačili páčku, ktorá riadila pohyb robotického ramena. Úlohou potkanov bolo posunúť rameno ku vzdialenému zdroju vody, nabrať kvapky vody a prisunúť si ich na dosah jazyka. Keď potkan stlačil páčku, rameno sa posunulo k zásobníku vody a nabralo niekoľko kvapiek. Keď páčku pustil, rameno sa posunulo k nemu, takže mohol z jeho konca vodu olízať (obr. 1). Zvieratá túto úlohu rýchlo pochopili a aby sa napili, stláčali páčku denne desiatky minút. V motorickej kôre a ventrolaterálnom talame – častiach potkanieho mozgu, ktoré riadia pohyby predných labiek – mali implantované elektródy, pomocou ktorých sa mohla zaznamenávať aktivita až 40 nervových buniek naraz (obr. 2).
Ich pokus si predstavíme bližšie. Smädné potkany boli natrénované, aby prednými labkami stlačili páčku, ktorá riadila pohyb robotického ramena. Úlohou potkanov bolo posunúť rameno ku vzdialenému zdroju vody, nabrať kvapky vody a prisunúť si ich na dosah jazyka. Keď potkan stlačil páčku, rameno sa posunulo k zásobníku vody a nabralo niekoľko kvapiek. Keď páčku pustil, rameno sa posunulo k nemu, takže mohol z jeho konca vodu olízať (obr. 1). Zvieratá túto úlohu rýchlo pochopili a aby sa napili, stláčali páčku denne desiatky minút. V motorickej kôre a ventrolaterálnom talame – častiach potkanieho mozgu, ktoré riadia pohyby predných labiek – mali implantované elektródy, pomocou ktorých sa mohla zaznamenávať aktivita až 40 nervových buniek naraz (obr. 2). {kind=link}
 Vedci skúmali túto aktivitu vo chvíli, keď potkan stláčal páčku. Snažili sa nájsť vzťah medzi nervovou aktivitou, pohybmi potkaních labiek a pohybmi robotického ramena. Na základe zaznamenanej nervovej aktivity chceli spoľahlivo predpovedať, kedy a akou silou potkan zatlačí na páčku, a teda kedy a akým smerom sa posunie robotické rameno.
Vedci skúmali túto aktivitu vo chvíli, keď potkan stláčal páčku. Snažili sa nájsť vzťah medzi nervovou aktivitou, pohybmi potkaních labiek a pohybmi robotického ramena. Na základe zaznamenanej nervovej aktivity chceli spoľahlivo predpovedať, kedy a akou silou potkan zatlačí na páčku, a teda kedy a akým smerom sa posunie robotické rameno.
Keď našli funkciu, pomocou ktorej bolo možné podľa nervovej aktivity predpovedať pohyby ramena, odpojili robotické rameno od páčky a riadili ho elektrickými signálmi z mozgu. Potkany samozrejme nevedeli že sa riadenie ramena zmenilo, a tak spočiatku pokračovali v stláčaní páčky. Postupne však zistili, že je to zbytočné, a prestali ju stláčať. Robotické rameno riadili len „telepaticky“ – pomocou nervových impulzov. Tento pokus ukázal, že na základe aktivity niekoľkých desiatok neurónov (zaznamenanej elektródami) možno riadiť pohyby robotického ramena. Mozgové oblasti, ktoré normálne riadia pohyby končatín, sa pomerne jednoducho naučia ovládať i technické zariadenie.
Myšlienka, že by sa nervovou aktivitou mohli riadiť robotické protézy končatín, je teda opodstatnená. Riadiť robotickú protézu ľudskej ruky alebo nohy je samozrejme oveľa zložitejšie než ovládať rameno v tomto pokuse. Rameno sa pohybovalo len po oblúku medzi zdrojom vody a pokanom, kým ľudské končatiny sa pohybujú v trojrozmernom priestore. V súčasnosti sa už pripravujú pokusy, v ktorých by potkany (či primáty) mozgovou aktivitou riadili pohyb robotických rúk v dvoj- alebo trojrozmernom priestore.
Protéza, ktorú by pacient cítil
Schopnosť riadiť pohyby protézy vlastnou vôľou nestačí na to, aby bola protéza skutočne funkčná. Aby ju pacient prijal za súčasť svojho tela, musel by v nej „mať cit“. V končatinách je mnoho receptorov pre tlak, teplotu, bolesť, vďaka ktorým zdraví ľudia môžu predmety nahmatať, poťažkať, vnímať ich teplotu. Robotické protézy možno pomerne jednoducho vybaviť receptormi teploty a tlaku, zložitejšie je odovzdať informácie z týchto technických senzorov nervovému systému tak, aby im porozumel.Podobne, ako sa dá pomocou elektród nahrávať elektrická aktivita mozgových neurónov, možno neuróny pomocou elektród dráždiť. O dôsledkoch elektrickej stimulácie mozgového tkaniva sa dozvedáme z pokusov na laboratórnych zvieratách, ako aj od pacientov, ktorí podstúpili operáciu mozgu. Z pokusov, pri ktorých sa dráždilo mozgové tkanivo, vyplynulo, že v mozgu nie sú žiadne zmyslové receptory, napríklad hmatu alebo bolesti (bolesť hlavy nie je bolesťou mozgu, ale ciev alebo mozgových blán). Ak sa mozgové tkanivo elektricky dráždi, môže sa to prejavovať rôznym spôsobom, podľa toho, ktorá časť mozgu je stimulovaná. Podráždenie častí mozgu, ktoré sa podieľajú na spracovaní zmyslových vnemov, sa prejaví ako vnem príslušnej zmyslovej modality. Ak sa napríklad dráždi zraková kôra, vníma človek zrakové vnemy, najčastejšie svetlé škvrny v rôznych častiach zrakového poľa. Ak sa dráždi časť mozgovej kôry vyhodnocujúca sluchové informácie, vníma človek zvukové vnemy, napríklad zvonenie či bzučanie. Informácie z receptorov hmatu, teploty či bolesti, ktoré sa nachádzajú na povrchu tela, spracúva tzv. somatosenzorická kôra. Rôzne časti somatosenzorickej kôry dostávajú signály z rôznych častí tela. Ak sa elektricky stimuluje napríklad tá časť somatosenzorickej kôry, ktorá vyhodnocuje signály prichádzajúce z pravej ruky, vníma človek dráždenie v pravej ruke.
Predstavme si teraz robotickú protézu – umelú ruku, ktorej súčasťou by bol dotykový senzor. Tento senzor prepojme s elektródou voperovanou do časti somatosenzorickej kôry, ktorá u zdravých ľudí spracúva signály prichádzajúce z pravej ruky. Pri každej aktivácii dotykového senzoru by elektróda vyslala signál neurónom somatosenzorickej kôry. Ako sme už spomínali, podráždenie somatosenzorickej kôry by viedlo k pocitu, že sa niečo dotklo pravej ruky. Človek by svoju protézu „cítil“.
Možnosti elektrickej stimulácie somatosenzorickej kôry študoval profesor Chapin a jeho kolegovia v ďalšom pokuse, ktorý priblížime. V tomto prípade išlo o stimulovanie tých oblastí somatosenzorickej kôry, ktoré spracúvajú dotykové signály z priústnych fúzov na pravej a ľavej strane. Vedci boli zvedaví, či potkany dokážu „porozumieť“ takejto stimulácii, rozlíšiť, či prichádza z pravej alebo ľavej strany, a prispôsobiť tomu správanie. Voperovali teda elektródy do somatosenzorickej kôry v pravej a ľavej mozgovej hemisfére. Ďalšie elektródy vložili do zväzku nervových vláken, ktoré prinášajú signál z mozgového kmeňa do predného mozgu. Tieto nervové vlákna sa aktivujú napríklad pri jedle alebo kopulácii a prenášajú pocity slasti spojené s týmito činnosťami. Niekedy sa nazývajú dráhou odmeny alebo slasti. Ak majú potkany možnosť stimulovať si dráhu odmeny napríklad tým, že majú prístup k páčke, ktorou sa do elektród púšťa elektrický prúd, nejedia, nespia, len stláčajú páčku do úplného vyčerpania.
 V pokuse profesora Chapina bol potkan vycvičený, aby sa po stimulácii „ľavých fúzov“ otočil vľavo a po stimulácii „pravých fúzov“ vpravo. Za správnu odpoveď bol odmenený stimuláciou dráhy slasti. Po niekoľkodňovom tréningu sa potkany úlohu naučili, a podľa toho, na ktorej strane bola ich somatosenzorická kôra dráždená, otáčali sa vľavo alebo vpravo. Z pokusu vyplynulo, že potkan dokáže porozumieť elektrickým signálom vysielaným do somatosenzorickej kôry, dokáže rozlíšiť dráždenie prichádzajúce z pravej a z ľavej strany a riadiť podľa neho svoje správanie.
V pokuse profesora Chapina bol potkan vycvičený, aby sa po stimulácii „ľavých fúzov“ otočil vľavo a po stimulácii „pravých fúzov“ vpravo. Za správnu odpoveď bol odmenený stimuláciou dráhy slasti. Po niekoľkodňovom tréningu sa potkany úlohu naučili, a podľa toho, na ktorej strane bola ich somatosenzorická kôra dráždená, otáčali sa vľavo alebo vpravo. Z pokusu vyplynulo, že potkan dokáže porozumieť elektrickým signálom vysielaným do somatosenzorickej kôry, dokáže rozlíšiť dráždenie prichádzajúce z pravej a z ľavej strany a riadiť podľa neho svoje správanie.
{kind=link}
Robot-potkan
Vedcov prekvapilo, že povely z elektród potkany poslúchali veľmi dôsledne, takže mohli spoľahlivo riadiť smer ich pohybu aj v prostrediach, ktoré boli pre ne neznáme. Tieto experimenty, ktoré mali pôvodne prispieť k výskumu nervovo ovládaných protéz, nabrali nový smer. Zrodil sa nápad využiť potkany ako akési bioroboty, v ktorých by bola skombinovaná ovládateľnosť umelých robotických systémov s pohyblivosťou a prispôsobivosťou živých organizmov.V jednom z pokusov napríklad vedci zostavili pre potkany prekážkovu dráhu pripomínajúcu cvičisko, na akom kynológovia trénujú psy. Potkan pomaly prekľučkoval slalomovou dráhou zostavenou z detských kociek, vyliezol po malom rebríku na stôl, prešiel po úzkej latke prichytenej medzi dvoma stolmi. I keď bol na dráhe prvý raz, prešiel všetkými prekážkami bez zaváhania na základe povelov, ktoré boli vyslané k elektródam implantovaným v jeho mozgu z klávesnice notebooku. V iných pokusoch sa potkany kvôli stimulácii dráhy odmeny nechali viesť napríklad aj korunami stromov alebo po schodoch. (Krátku videonáhravku diaľkovo riadeného potkana možno nájsť na vesmir.msu.cas.cz). Diaľkovo riadené potkany by sa dali využiť napríklad pri záchranných prácach po zemetraseniach a pod. V batôžku na chrbte by mohli nosiť miniatúrnu kameru a sprostredkovať obraz z neprístupných miest. Ďalšou oblasťou využitia by mohla byť vojenská – prehľadávanie nebezpečných či potenciálne nebezpečných oblastí.
Z opísaných pokusov vidno, že nervový systém možno prepojiť s elektronickým. Toto prepojenie môže byť obojsmerné, mozgové signály sa dajú použiť na ovládanie umelých robotických systémov a naopak, signály pochádzajúce z elektronických systémov možno priviesť do mozgového tkaniva a mozog im dokáže porozumieť. Tieto poznatky povedú k vytvoreniu dokonalejších protéz, priamo prepojených s mozgom pacientov. Budú sa pohybovať podľa povelov vychádzajúcich z mozgu pacienta a na oplátku ho budú informovať o teplote či povrchu predmetov, ktorých sa budú dotýkať.
Literatura
Talwar, S. K. et al.: Rat navigation guided by remote control. Nature 471, 37, 2002Chapin, J. K.: Neural prosthetic devices for quadriplegia. Curr Opin Neurol, 2000, Dec; 13 (6), 671–675.
Chapin, J. K. et al.: Real-time control of a robot arm using simultaneously recorded neurons in the motor cortex. Nat Neurosci, 1999, Jul; 2 (7), 664–670.
Ke stažení
 Článek ve formátu PDF [1,9 MB]
Článek ve formátu PDF [1,9 MB]
O autorovi
Eduard Kelemen
Doporučujeme

Když bahno teče jako ledovec

Ideologie v mapách, mapy v rukách ideologů 
